



SPM
PARALLEL MANIPULATORS
SPM
PARALLEL MANIPULATORS
From Design and Simulation...




...to Fabrication and Control



Parallel manipulators are widely used for high speed, high accuracy positioning with limited workspace applications, e.g. in flight and automobile simulators, medical and industrial robotics, mechatronic applications, etc. Among numerous types of parallel manipulators, spherical parallel manipulators (SPMs) can be applied for designing orientation wrist platforms for industrial robot end effectors, solar or parabolic antenna orientation systems, medical and rehabilitation robots.
Orientation Manipulator
ORIENTATION MANIPULATOR
Orientation Manipulator
ORIENTATION MANIPULATOR


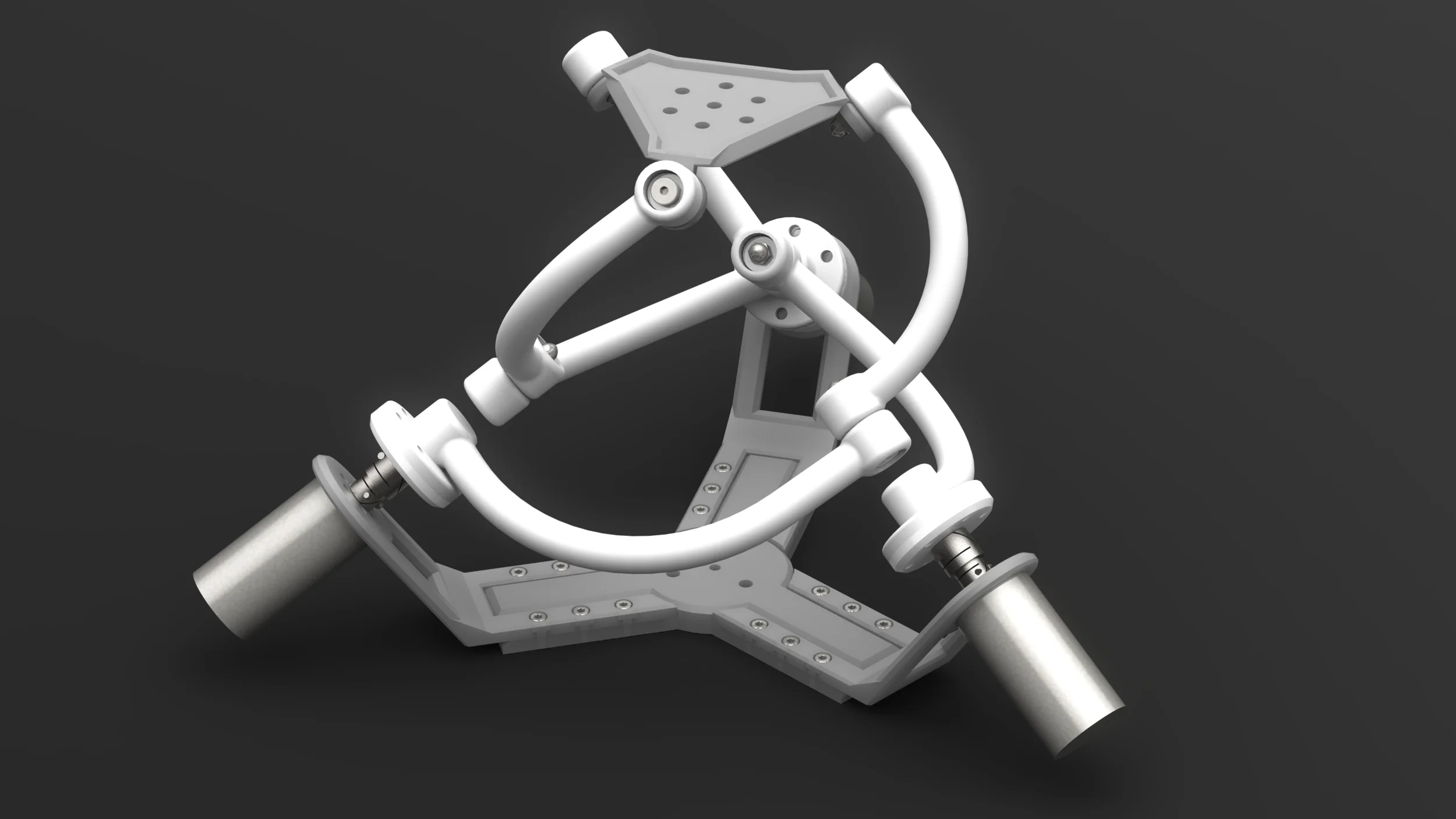
SINGULARITY FREE - OMNI WRIST
Two-degree-of-freedom (2DOF) pointing mechanisms have been widely used in areas such as stabilized platforms, tracking devices, etc. The Omni-Wrist III robotic manipulator, inspired in design by the kinematics of the human wrist, is capable of a full 180° hemisphere of singularity-free pitch/yaw motion. The Omni-Wirst III is a very capable alternative to traditional gimbals systems.
SPM_coaxial
COAXIAL MANIPULATORS
SPM_coaxial
COAXIAL MANIPULATORS


Parallel manipulators are widely used for high speed, high accuracy positioning with limited workspace applications, e.g. in flight and automobile simulators, medical and industrial robotics, mechatronic applications, etc. Among numerous types of parallel manipulators, spherical parallel manipulators (SPMs) can be applied for designing orientation wrist platforms for industrial robot end effectors, solar or parabolic antenna orientation systems, medical and rehabilitation robots.
New SPM
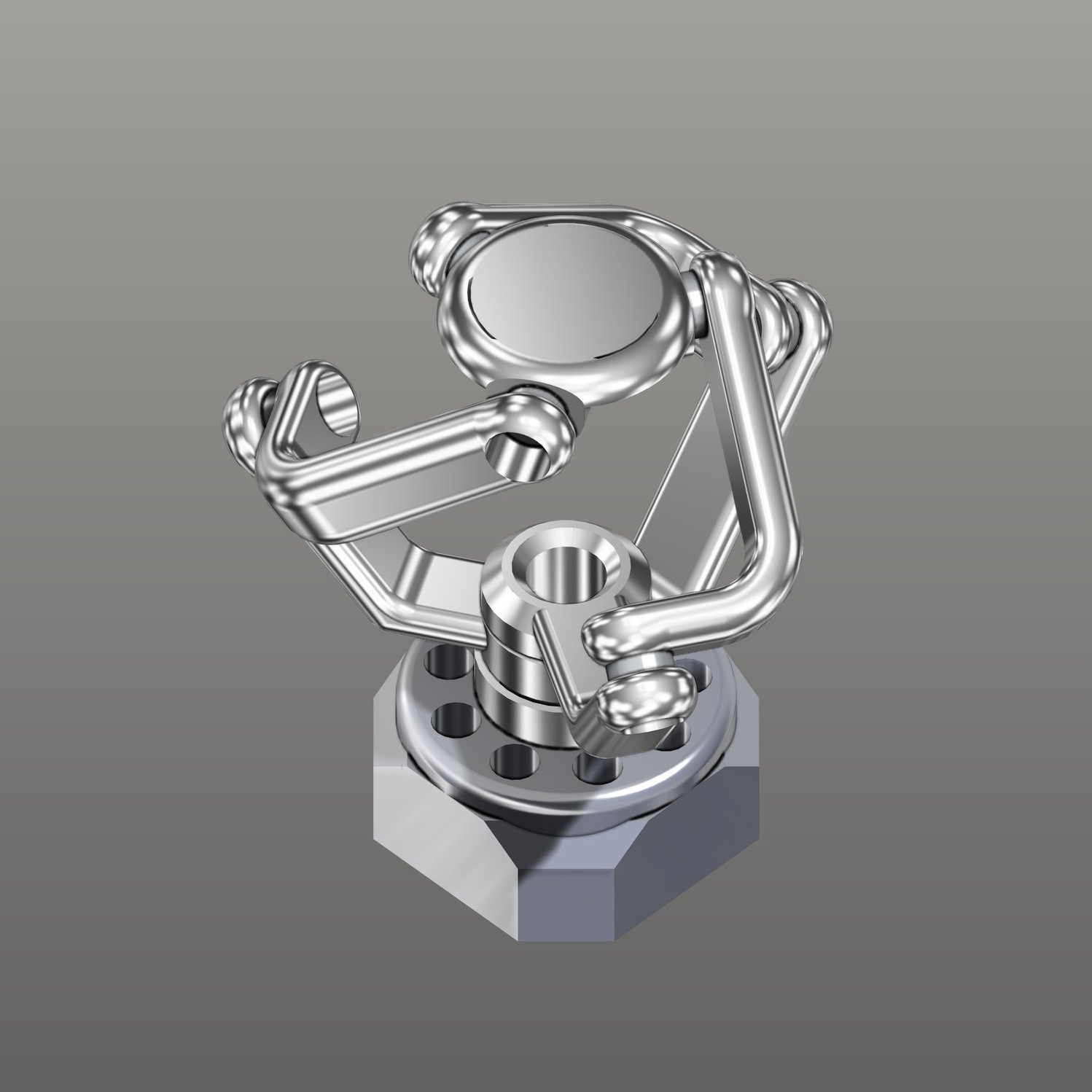
SPHERICAL PARALLEL MANIPULATORS
New SPM
SPHERICAL PARALLEL MANIPULATORS



Parallel manipulators are widely used for high speed, high accuracy positioning with limited workspace applications, e.g. in flight and automobile simulators, medical and industrial robotics, mechatronic applications, etc. Among numerous types of parallel manipulators, spherical parallel manipulators (SPMs) can be applied for designing orientation wrist platforms for industrial robot end effectors, solar or parabolic antenna orientation systems, medical and rehabilitation robots.
Hybrid Spherical Manipulators
AGILE AND DEXTEROUS
Hybrid Spherical Manipulators
AGILE AND DEXTEROUS